Windschering en veiligheid in de burgerluchtvaart
Windschering is een atmosferisch fenomeen dat een plotselinge verandering in windsnelheid in horizontale en verticale richtingen is. Windschering, met name windschering op lage hoogte, is een belangrijke factor bij veel luchtvaartongevallen, met name die waarbij vliegtuigen betrokken zijn. Tot de afgelopen decennia was er weinig bekend over het effect ervan op de luchtvaartveiligheid, maar recente ontwikkelingen in de LiDAR-technologie hebben bijgedragen aan een beter begrip van de effecten van windschering. Tegenwoordig wordt LiDAR aan boord vaak gebruikt om de wind tijdens de vlucht te volgen, terwijl de op de grond gebaseerde doppler 3D-scanwind LiDAR veranderingen in windsnelheid in de buurt van de luchthaven kan detecteren.
Windschering is uiterst schadelijk voor luchtvaartvluchten, vooral tijdens het opstijgen en landen, vanwege de lage vliegsnelheid kan windschering een groot effect hebben op de luchtsnelheid van het vliegtuig, wat resulteert in plotselinge veranderingen in de houding en hoogte van het vliegtuig, soms met rampzalige resultaten op lage hoogte. In 1985 stortte een vliegtuig neer op Dallas-Fox Airport in de Verenigde Staten, waarbij 137 mensen omkwamen. Sindsdien is windschering onderzocht als een internationaal onderwerp. Volgens Coleman, directeur van het National Center for Atmospheric Research in Boulder, zijn na 1985 alle vliegtuigen in de Verenigde Staten uitgerust met windscheringdetectoren, en in Canada in de jaren negentig.
Hoe detecteert 3D Dopper Scanning Wind Lidar windschering?
Een 3D-windlidar-afbeelding is een 3D-weergave van het windveld. De foto's zijn meestal van bovenaf genomen. Windsnelheden worden gemeten in m/s. Een vliegtuig dat over een startbaan vliegt, kan bijvoorbeeld een windsnelheid van 14 m/s ervaren. De oppervlaktewind is licht op deze hoogte en is tegengesteld aan de hogere niveaus van de atmosfeer.
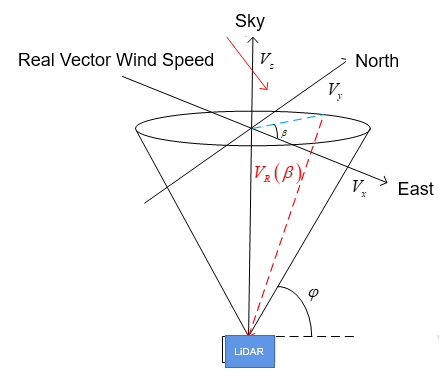
Dit type windlidar-scan maakt gebruik van een optische kop die is bevestigd aan een vaste elevatiehoek. De azimut wordt op zijn beurt constant herhaald van 0 tot 360 graden. Hierdoor ontstaat een kegelvormig oppervlak dat in 2D-perspectief als een cirkel wordt weergegeven.
Een driedimensionaal windlidar-beeld is een samenstelling van meerdere afbeeldingen. De gegevens worden door een deskundige geïnterpreteerd om een nauwkeurige voorspelling te doen voor de toestand van een luchthaven. Het kan ook worden gebruikt om windgerelateerde omstandigheden te identificeren. Naast het detecteren van windschering, kan het ook worden gebruikt om microbursts te identificeren. Als een bepaalde weersgebeurtenis gepaard gaat met harde wind, wordt er een waarschuwing gegenereerd.
Met behulp van deze technologie kan lidar ernstige weersverschijnselen detecteren die de luchtvaart kunnen beïnvloeden. Windschering op laag niveau gaat bijvoorbeeld vaak gepaard met downbursts. Om windschering te detecteren, kunnen lidar-gegevens worden verwerkt en geanalyseerd door een computeralgoritme. Daarnaast worden lidargegevens geëvalueerd op aerosolgehalte.
Doppler 3D Scanning Wind LiDAR Glide Path Scanning Principe
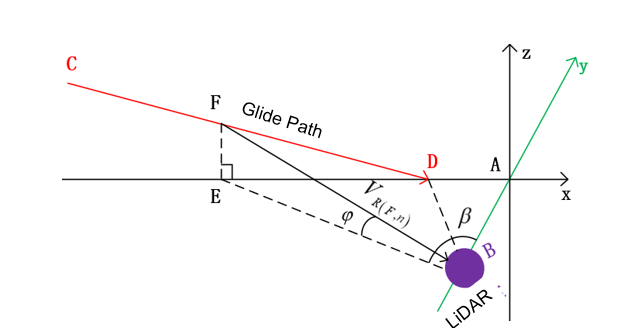
Glide path scanning richt zich op het observeren van het windveld in het start- en landingsgebied van het vliegtuig, en de azimut- en pitchhoeken veranderen gelijktijdig tijdens het scanproces.
Gebruik de PPI-modus van 3D Scanning Wind LiDAR om windschering te detecteren
PPI-scanprincipe: onder de voorwaarde van constante LiDAR-pitchhoek, azimuthoekzwaaiscanning.
Gebruik vervolgens de gesynthetiseerde C-factor om de windschering te beoordelen:
- Wanneer de C-factor tussen 0,068-0,138 ligt, wordt matige windschering overwogen;
- wanneer de C-factor tussen 0,139-0,206 ligt, wordt rekening gehouden met sterke windschering
- wanneer de C-factor groter is dan 0,207, wordt rekening gehouden met ernstige windschering.
Vliegtuig Wake Vortex-detectie
De vleugel van een vliegtuig tijdens de vlucht zal de atmosfeer verstoren en een gesloten draaikolk vormen die in de tegenovergestelde richting rond de vleugel draait, de staartwervel van het vliegtuig. De vortex is sterk en bestaat voor een lange tijd, wat de vlucht van het volgende vliegtuig veilig zal maken. Het vormt een ernstige bedreiging, waardoor de volgafstand van vliegtuigen op de luchthaven bij het opstijgen of landen wordt beperkt en de luchthavencapaciteit wordt verminderd.
Dit probleem is een kernprobleem geworden op het gebied van vliegveiligheid van vliegtuigen en luchthavenluchtvaartcontrole in binnen- en buitenland. De studie van zogvortexkenmerken en de detectietechnologie ervan is van groot belang om dit probleem op te lossen. Ten eerste kan de geavanceerde wake vortex-detectietechnologie worden gebruikt om vliegtuigen te vermijden. De zogvortex kan het doel bereiken om de vliegveiligheid te waarborgen; bovendien kan het de beperkingen van traditionele normen voor veilige vluchtafstanden doorbreken en de vervoerscapaciteit van de luchthaven aanzienlijk verbeteren.
Gebruik de PPI-modus van 3D Scanning Wind LiDAR om Aircraft Wake Vortex te detecteren
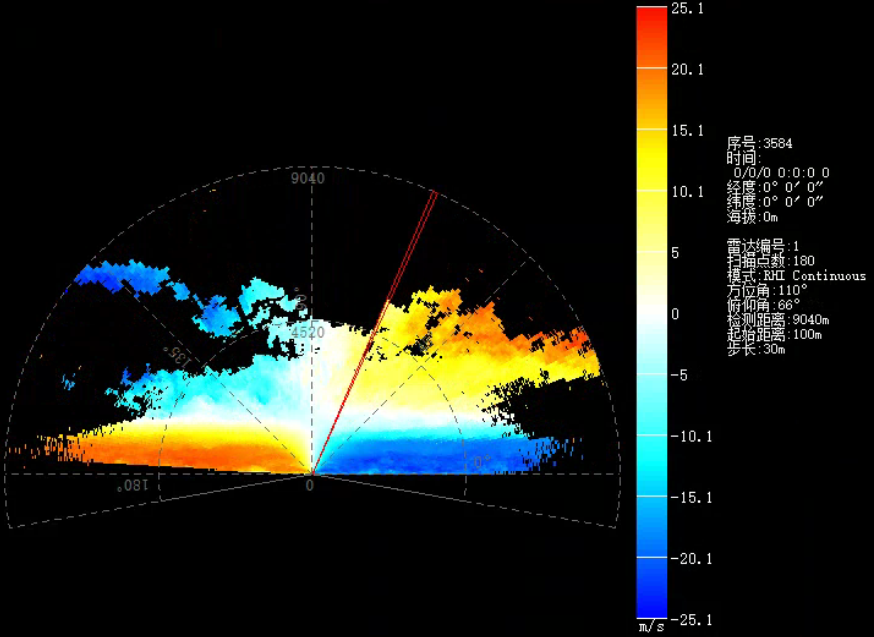
Het principe van RHI-detectie van windschering: wanneer de azimuthoek van de radar onveranderd blijft, wordt de hellingshoek gescand.
Locatiefoto's



